Iterative Search
Random Search
Solver name is “Random”.
- class flopt.solvers.random_search.RandomSearch[source]
Random Sampling Search
Examples
import flopt x = flopt.Variable("x", lowBound=-1, upBound=1, cat="Continuous") y = flopt.Variable("y", lowBound=-1, upBound=1, cat="Continuous") prob = flopt.Problem() prob += 2*x*x + x*y + y*y + x + y status, log = prob.solve(solver="Random", msg=True, timelimit=1) print("obj =", flopt.Value(prob.obj)) print("x =", flopt.Value(x)) print("y =", flopt.Value(y))
2-Opt (TwoOpt)
Solver name is “2-Opt”.
Steepest Descent Search
Solver name is “SteepestDescent”.
- class flopt.solvers.steepest_descent.SteepestDescentSearch[source]
Steepest Descent Search
Update search points as x_{n+1} = x_n - alpha d, where d = -grad(x_n) and alpha is a step size calculated by Armijo’s method.
Examples
import flopt x = flopt.Variable("x", lowBound=-1, upBound=1, cat="Continuous") y = flopt.Variable("y", lowBound=-1, upBound=1, cat="Continuous") prob = flopt.Problem() prob += 2*x*x + x*y + y*y + x + y status, log = prob.solve(solver="SteepestDescent", msg=True, timelimit=1) print("obj =", flopt.Value(prob.obj)) print("x =", flopt.Value(x)) print("y =", flopt.Value(y))
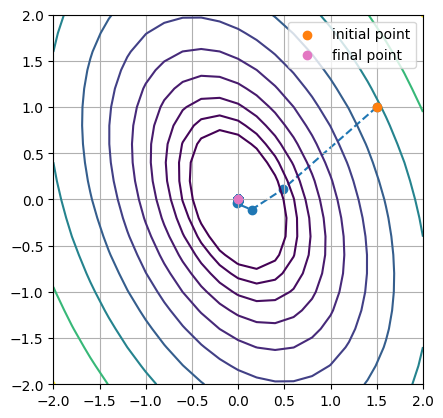
Here is an example for visualization of optimization of \(f(x) = 2 x_0^2 + x_1^2 + x_0x_1`\).
We prepare the callback function for saving the search points.
path = [[x[0].value(), x[1].value()]]
def callback(solutions):
path.append(solutions[0].value())
Then, we specify this to the callbacl argument of the Problem.solve().
status, log = prob.solve(solver, msg=True, timelimit=1, callback=callback)
Finally, we visualize the search path.
import flopt
x = flopt.Variable.array("x", 2, cat="Continuous")
x[0].setValue(1.5)
x[1].setValue(1.0)
def f(x):
return 2*x[0]**2 + x[1]**2 + x[0]*x[1]
prob = flopt.Problem()
prob += f(x)
path = [[x[0].value(), x[1].value()]]
def callback(solutions):
path.append(solutions[0].value())
solver = flopt.Solver("SteepestDescent")
solver.setParams(xi=0.9, tau=0.9)
status, log = prob.solve(solver, msg=True, timelimit=1, callback=callback)
import numpy as np
import matplotlib.pyplot as plt
X = Y = np.linspace(-2, 2, 21)
X_mesh, Y_mesh = np.meshgrid(X, Y)
Z = f(np.array((X_mesh, Y_mesh)))
fig, ax = plt.subplots()
cmap = plt.get_cmap("tab10")
color_i = 0
ax.contour(X, Y, Z, levels=np.logspace(-0.3, 1.2, 10))
path = np.array(path)
ax.plot(path[:,0], path[:,1], marker="o", linestyle="--", color=cmap(0), zorder=1)
ax.scatter(path[0, 0], path[0, 1], marker="o", color=cmap(1), label="initial point", zorder=2)
ax.scatter(path[-1, 0], path[-1, 1], marker="o", color=cmap(6), label="final point", zorder=2)
ax.set_aspect('equal')
ax.grid("--")
ax.legend()